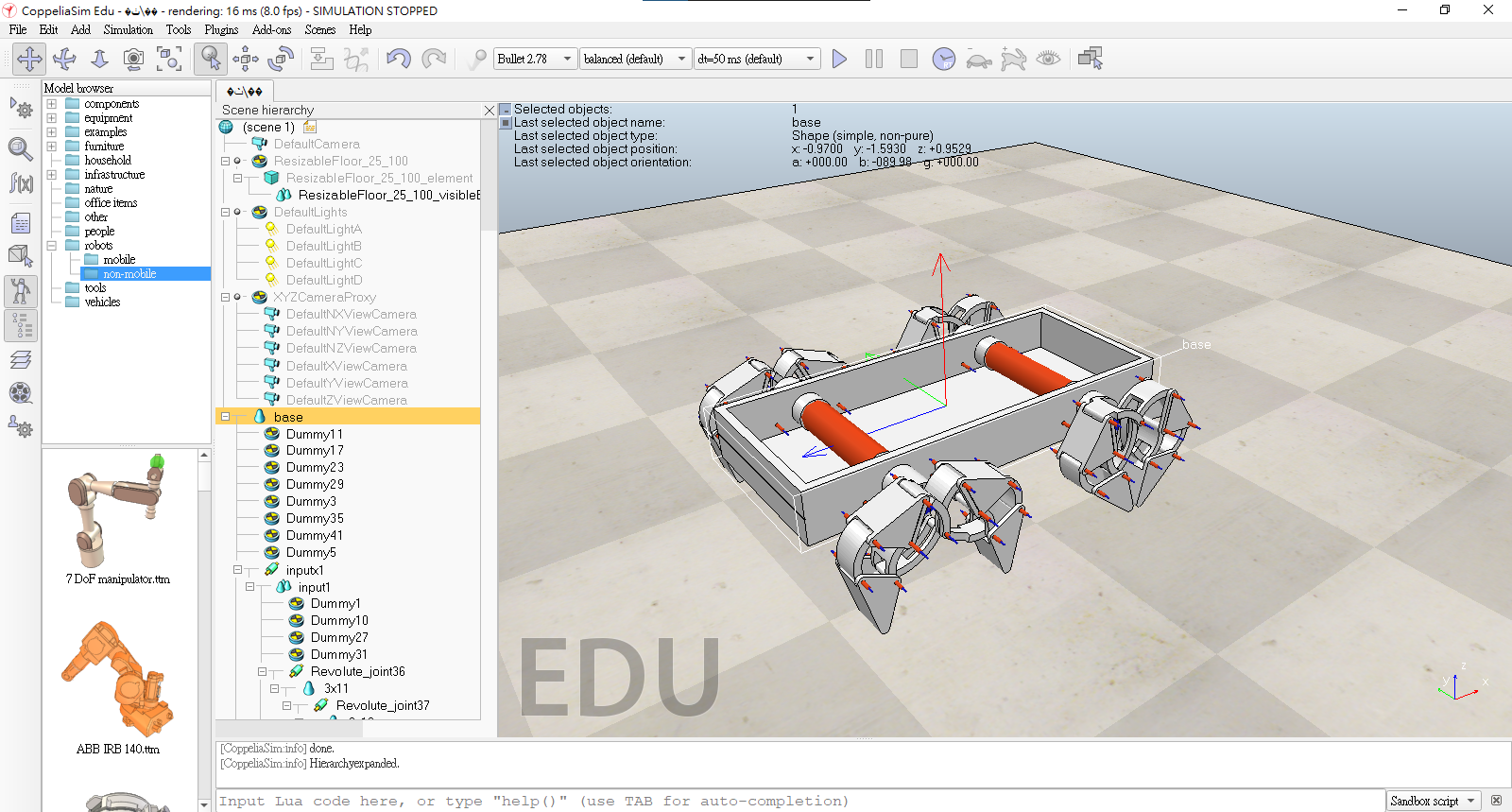
解決會亂飛的問題後改成這樣
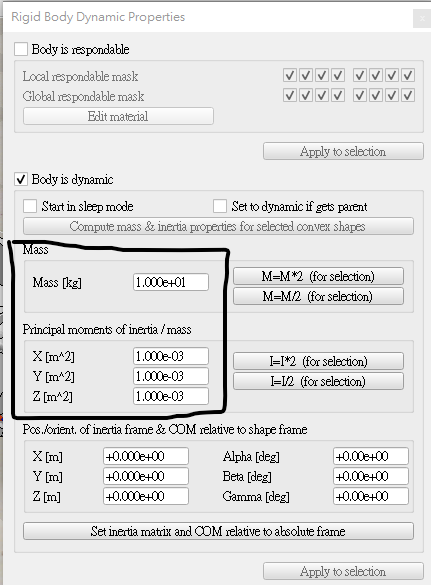
後來發現重量跟慣性矩也可能和主體會不會正常運作有關
後腳可以正常運作 不過又多了一個會一直往前傾倒的問題
--------------------------6/19更新-------------------------------------
調了一些慣性矩 情況有好些 但是當前腳把主體撐起來時前腳就爛掉了
Copyright © All rights reserved | This template is made with by Colorlib
 - SIMULATION STOPPED 2021-06-19 23-42-14 (1).gif)