第四版組合圖
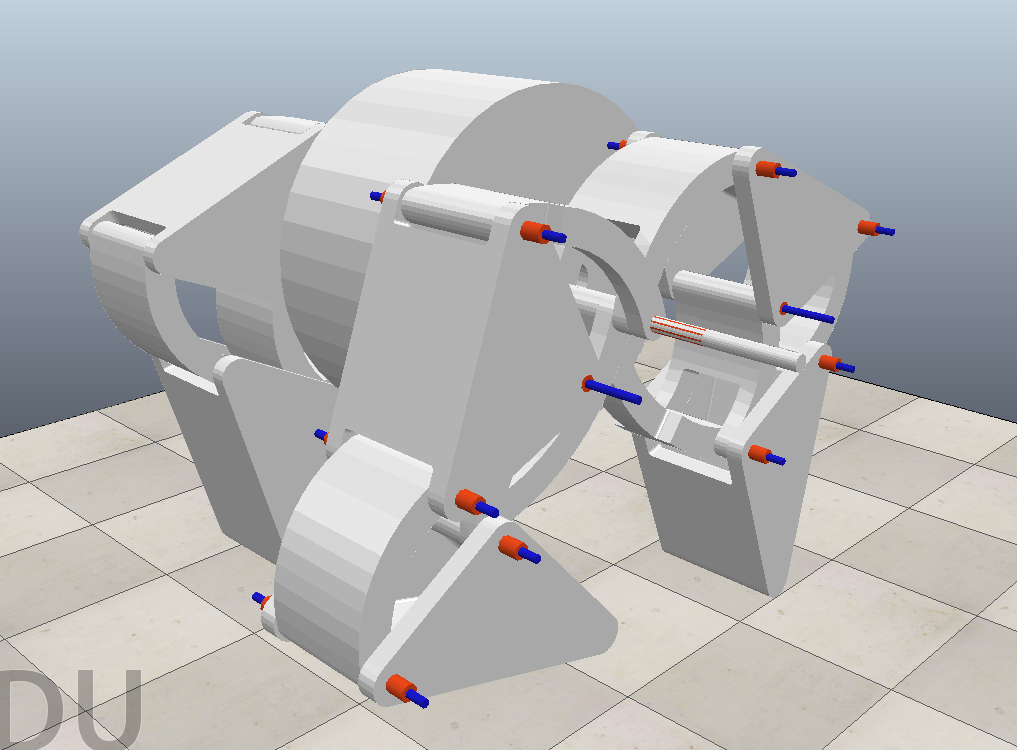
第四版本模擬
因為模擬後發現如果開模擬後某一個桿子會跟中心點卡到
開模擬會直接撞爛
所以就沒有再模擬下去了
第五版本模擬
新增避讓 簡化零件 美化零件
這個版本是先模擬一部份如果沒有問題就可以繼續模擬下去
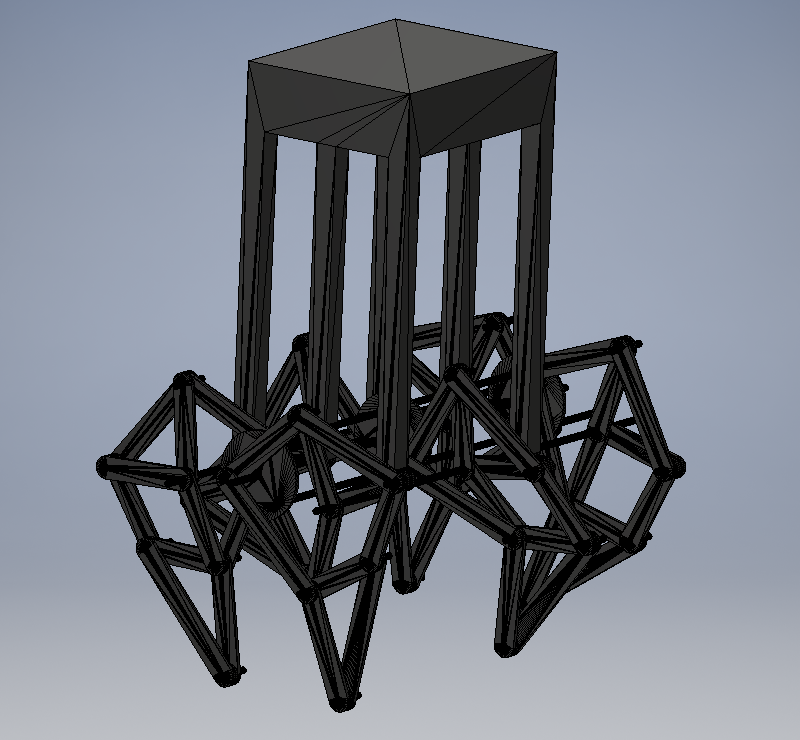
第六版本組合圖
因為發現有些錯誤就沒有模擬
Copyright © All rights reserved | This template is made with by Colorlib
.gif)
.gif)