第一版本的檔案
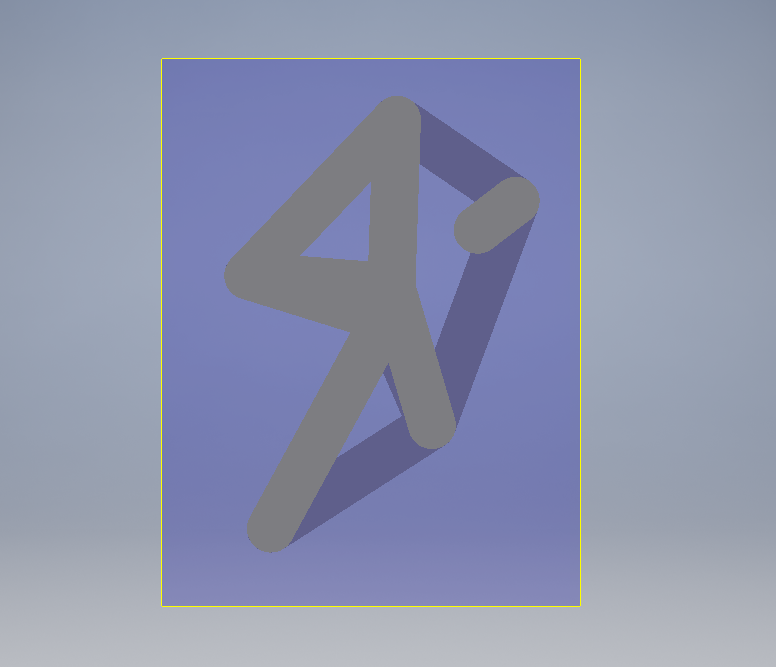
第一版本的圖
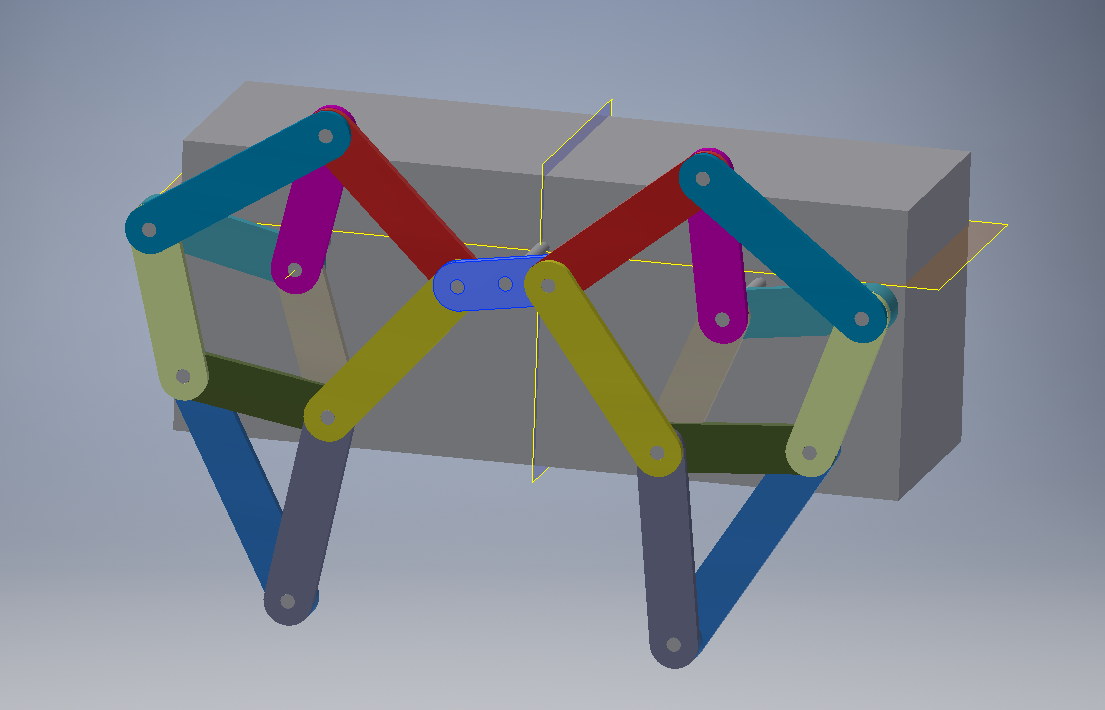
第一次先想機構並且畫好部份徒先用Inventor模擬
第二版本檔案
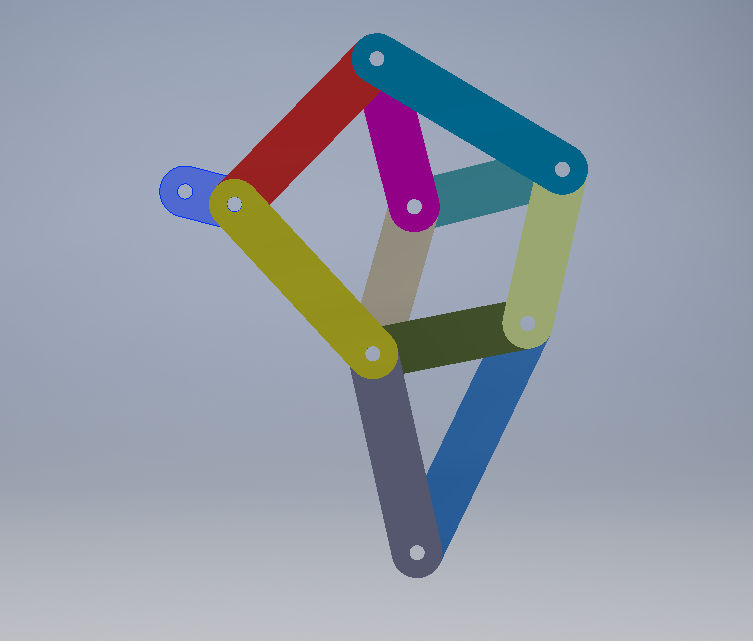
第二版本的組合圖
加入了驅動軸並且修正運行軌道
第二版本Inventor模擬圖
第三版本檔案
第三版本模擬一半
第三版本組合圖
第三本版組完整模擬圖
CoppeliaSima設定問題沒辦法正常運作
Copyright © All rights reserved | This template is made with by Colorlib