W3 進度報告 <<
Previous Next >> STAGE2-AG10
W4 進度報告
遇到的問題和解決的方案:
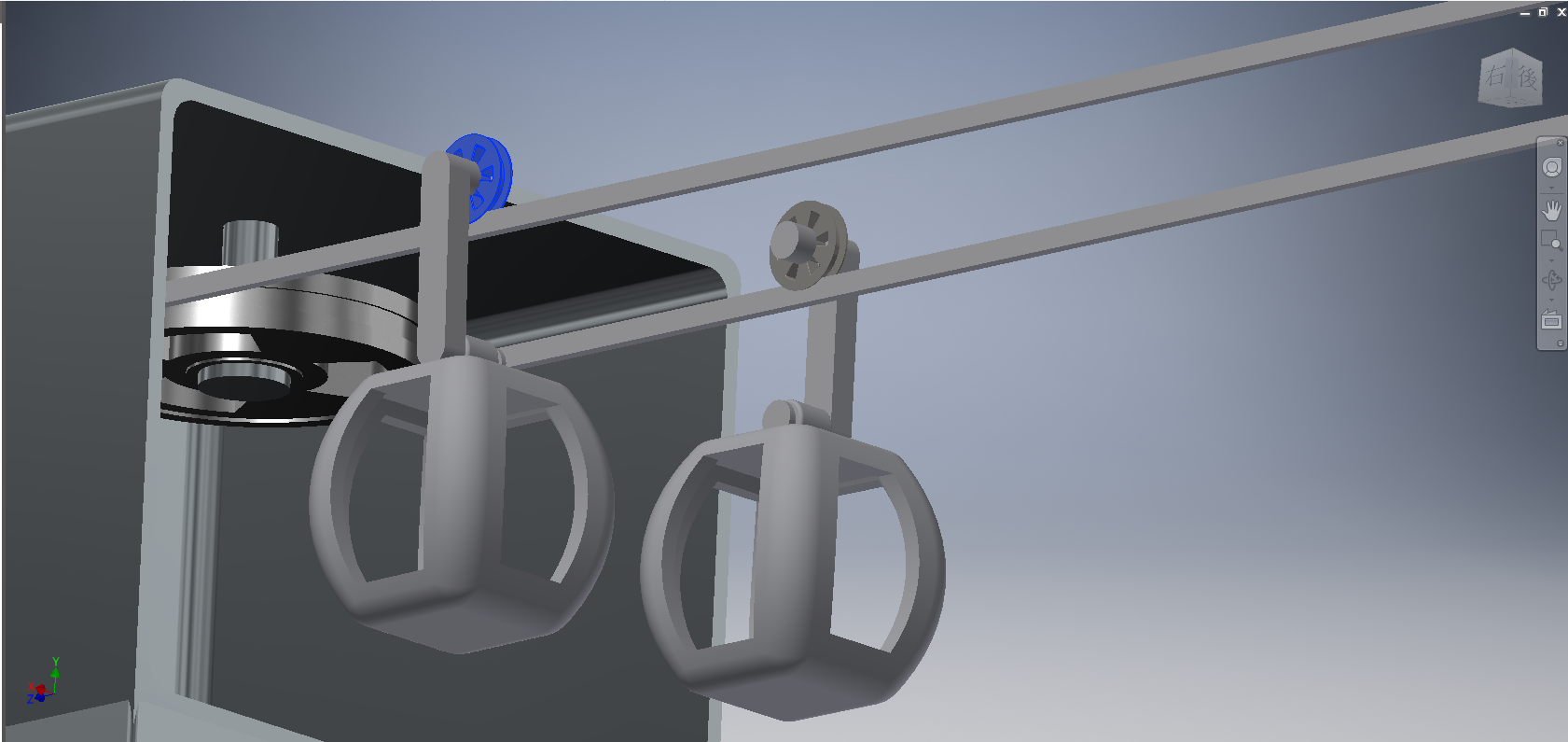
當畫完並接起來的時候發現皮帶跟傳動輪會卡到纜車的輪子
導致無法通過目前正在想辦法解決並加以繪製
 ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄3/16更新 ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄
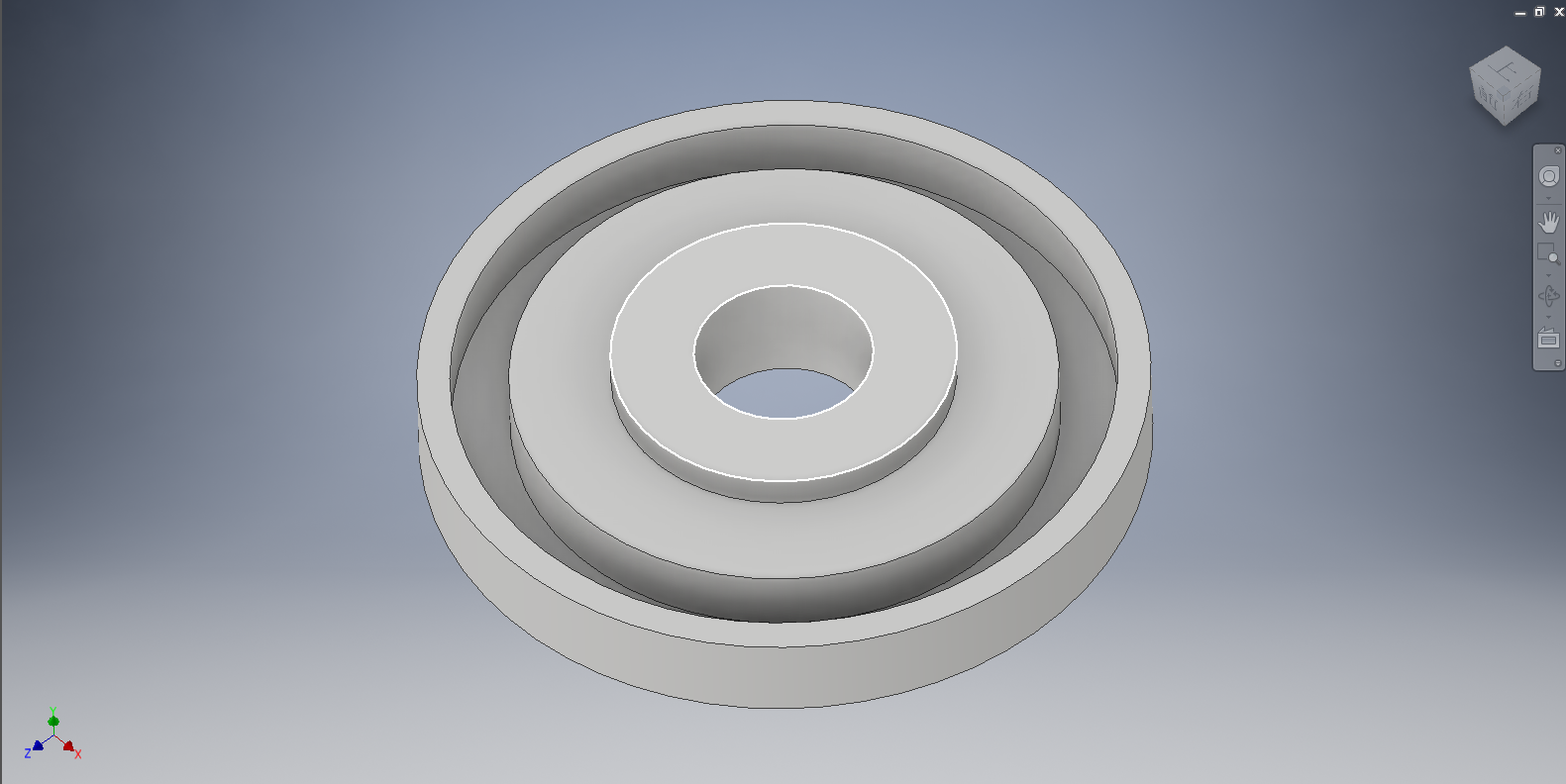
原本以為把輪子畫成這樣就可以解決以上問題但
迴轉出來長這樣就算ㄌ
 ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄
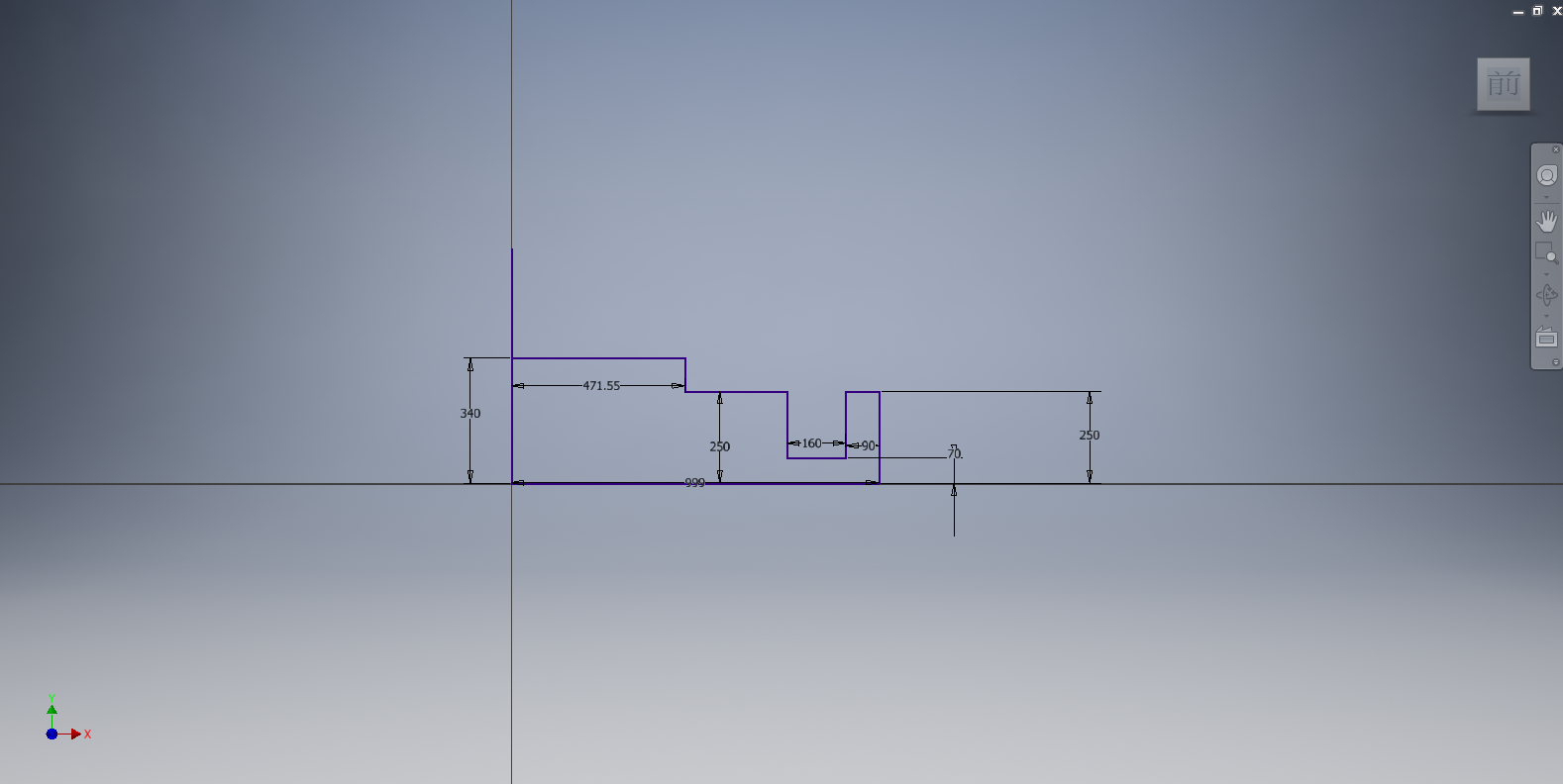
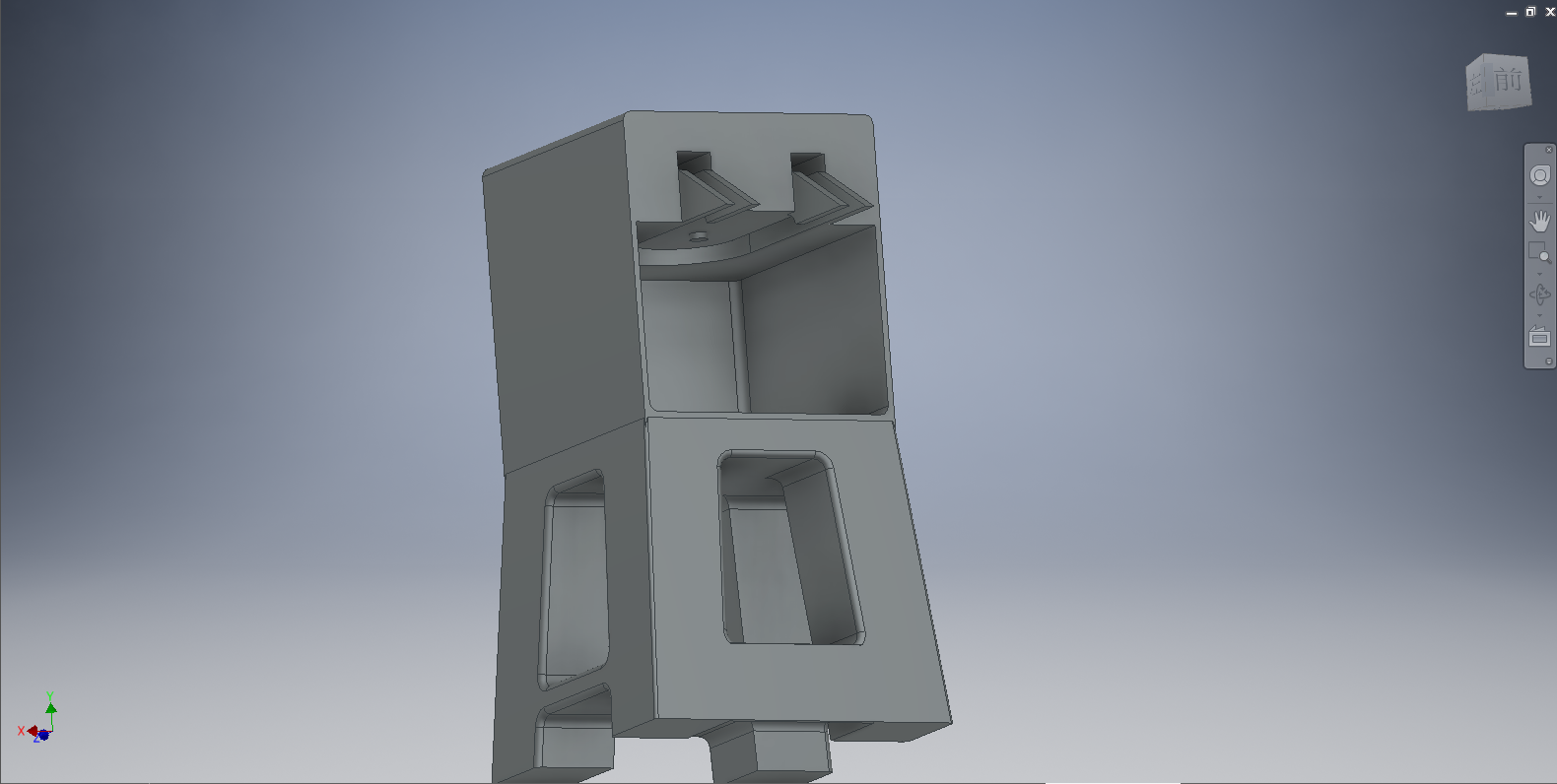
後來想到加裝輔助輪然後站台上再畫出輔助輪的軌道
原本想讓主輪子也跟者一起上軌道
但會卡到路徑(黑色部分)
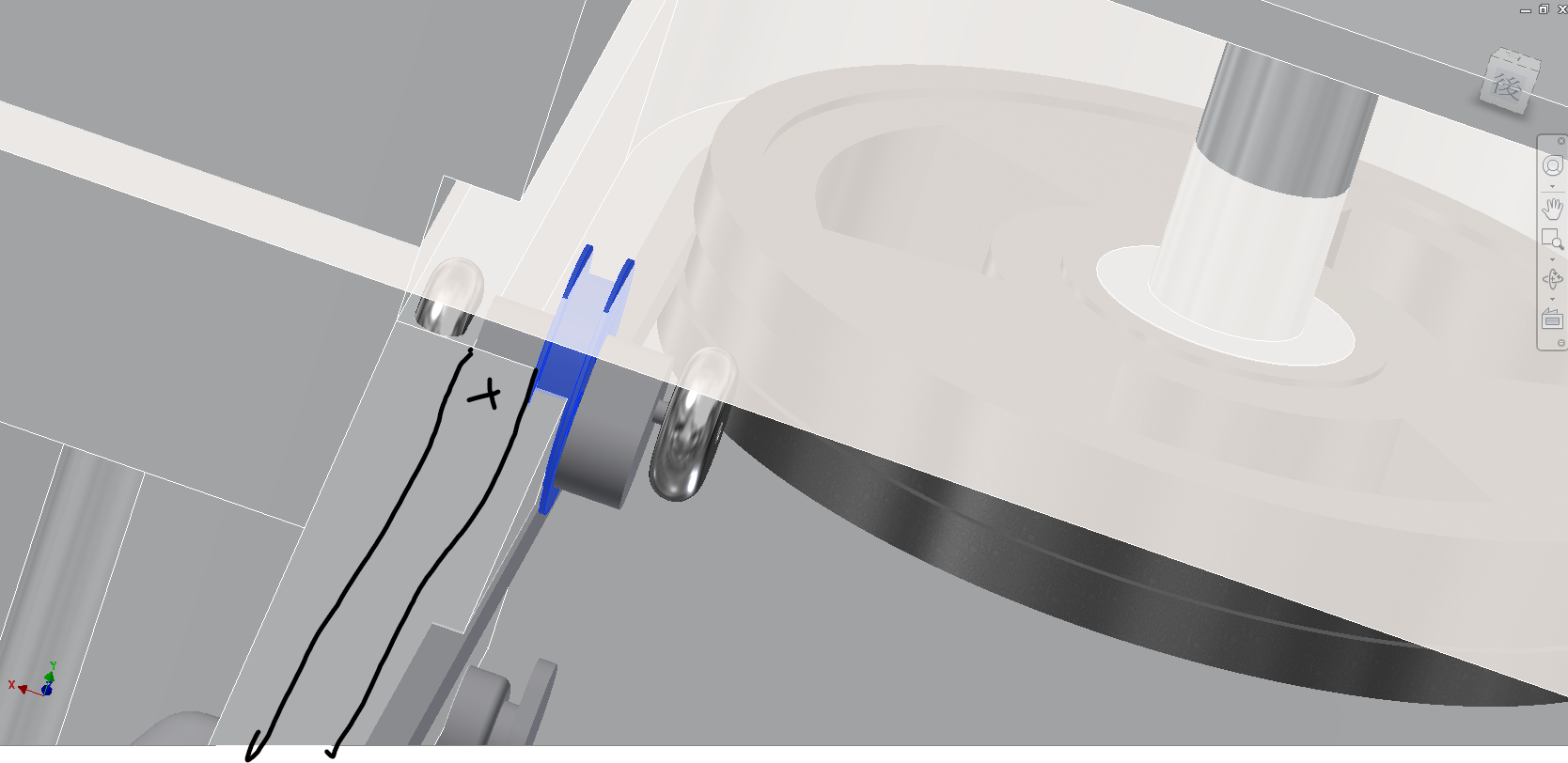
就把主輪子的軌道刪掉 留下輔助輪的軌道
 ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄ ̄
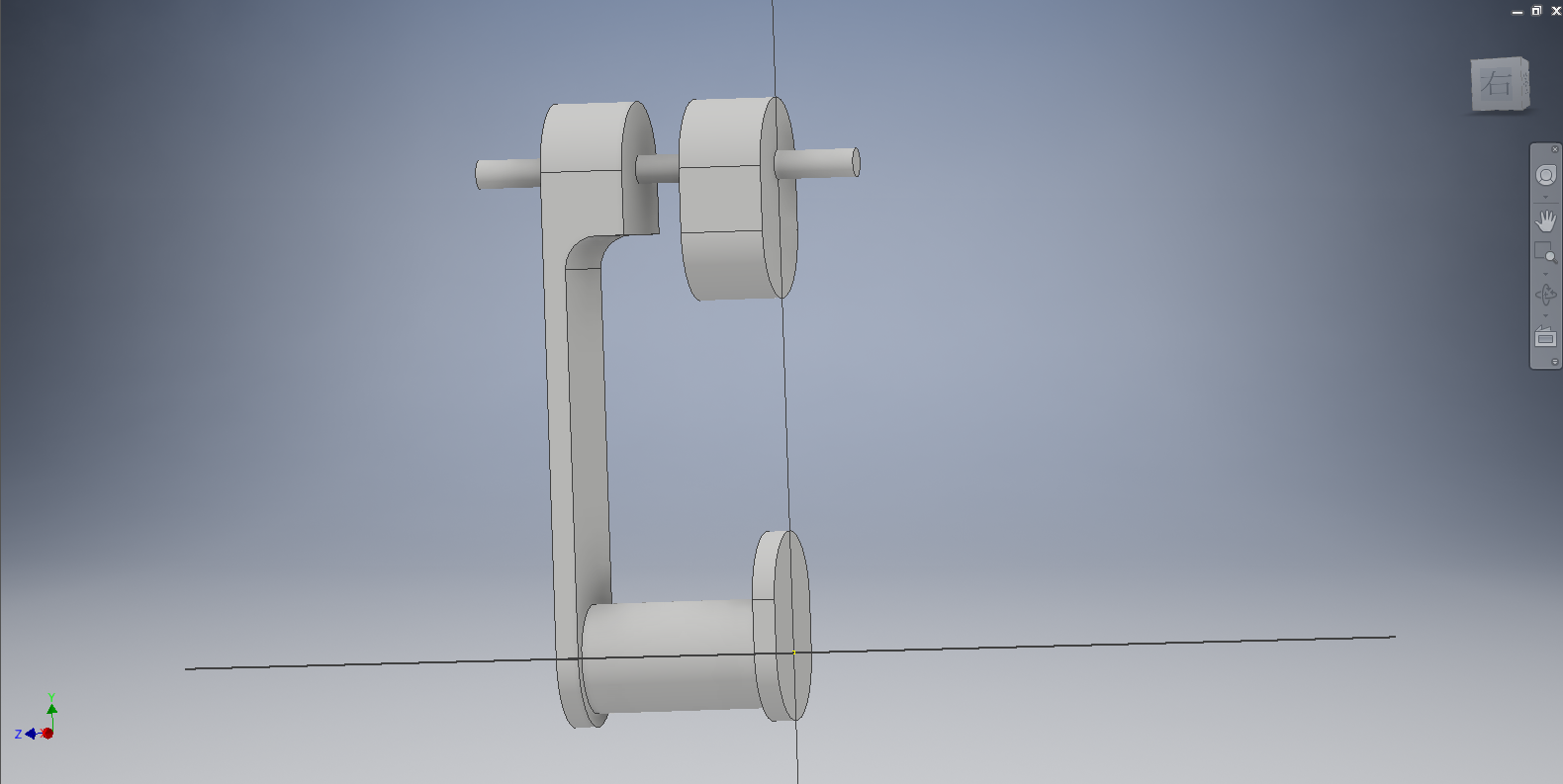
原本連接纜車的連接桿會卡到纜車行動路徑
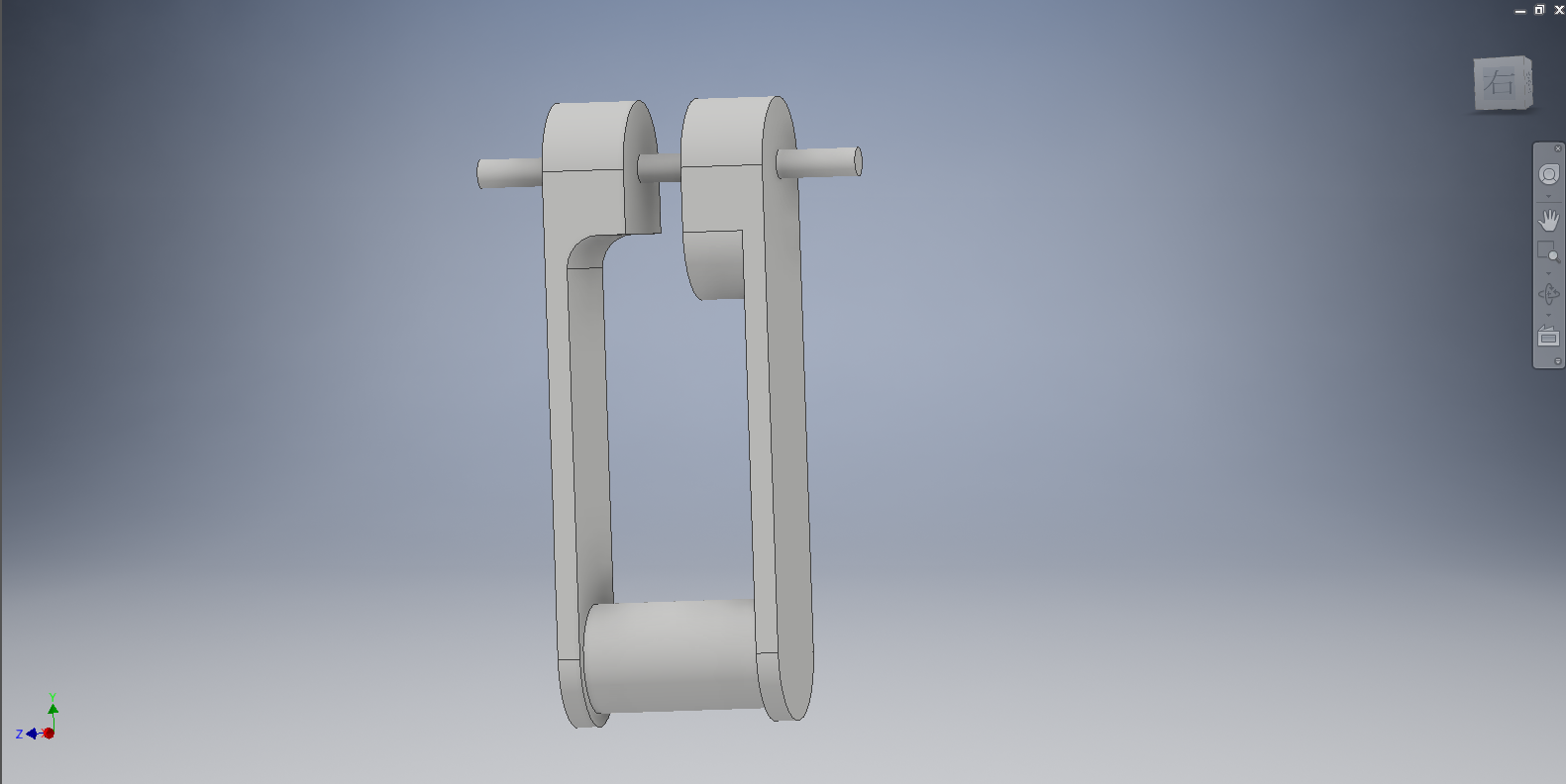
於是修改成把一邊刪除
W3 進度報告 <<
Previous Next >> STAGE2-AG10